(0)
Pixhawk 2.4.8 Drone Flight Controller PX4 32 Bit Autopilot
The Pixhawk 2.4.8
Drone Flight Controller
PX4 advanced 32-bit CortexM4 ARM high performance processor, can run RTOS NuttX real-time operating system Bus interface (UART, I2C, SPI, CAN) Integrated backup power supply and failure backup controller, the main controller can be safely switched to backup control Provide automatic and manual mode Provide redundant power input and fault transfer function.
It Supports 8 RC channel with 4 serial port. Various user interfaces are available for programing, reviewing logs, even some apps for smartphones & tablets. It detects and configures all its peripherals automatically.
The benefits of the Pixhawk 2.4.8 flight controller system include a Unix/Linux-like programming environment, completely new autopilot functions. Sophisticated scripting of missions and flight behavior, and a custom PX4 driver layer ensuring tight timing across all processes.
check out :
Mini OSD Module For 2.6 APM PIX Pixhawk Flight Control Board
Processor of Pixhawk Flight Controller:
32bit STM32F427 Cortex M4 core with FPU
168MHz
256KB RAM
2 MB Flash
32 bit STM32STMF100 failsafe co-processor
Sensor:
ST Micro L3GD20H 16 bit gyroscope
ST Micro LSM303D 14 bit accelerometer/magnetometer
Invensense MPU 6000 3-axis accelerometer/gyroscope
MEAS MS5611 barometer
Interfaces:
5x UART (serial ports), one high-power capable, 2x with HW flow control.
2x CAN (one with an internal 3.3V transceiver, one on expansion connector).
Spektrum DSM / DSM2 / DSM-X Satellite compatible input.
Futaba S.BUS compatible input and output.
PPM sum signal input.
RSSI (PWM or voltage) input.
I2C.
SPI.
3.3 and 6.6V ADC inputs.
Internal micro USB port and external micro USB port extension.
Features:
Advanced 32 bit CortexM4 ARM high-performance processor.
32 bit STM32STMF100 failsafe co-processor.
Multiple flight modes including self-stability, height-set, hover, sports, freestyle, circling, following, return, guidance, and automatic.
Switchable flight modes for Helicopter, Fixed-wing, Multi-rotor, and Model Car.
Multi-sound buzzer interface.
Abundant connectivity options for additional peripherals such as GPS, I2C, and SPI
14 PWM/servo outputs (8 with failsafe and manual override, 6 auxiliary, high-power compatible).
Supports DSM Spektrum receiver.
Unix/Linux-like programming environment.
Automatic configuration of peripherals.
Unix/Linux-like programming environment.
Unix/Linux-like programming environment.
Supports sophisticated scripting of missions and flight behavior.
Custom PX4 driver layer ensuring tight timing across all processes.
Applications:
Drone/UAV flight control.
Autonomous aerial photography and videography.
Precision agriculture for crop monitoring and spraying.
Search and rescue missions.
Environmental monitoring.
Infrastructure inspection (such as pipelines, power lines, and buildings).
Wildlife conservation and monitoring.
Disaster management and assessment.
Geographical mapping and surveying.
Delivery services.
Why Choose Pixhawk 2.4.8?
Open-source platform compatible with PX4 and ArduPilot firmware for flexibility and customization.
Reliable and proven 32-bit flight controller for stable and precise drone performance.
Supports multiple vehicle types including quadcopters, fixed-wing, and rovers.
Rich connectivity with multiple UART, I2C, CAN, and PWM ports for sensors and accessories.
Built-in safety features such as failsafe system and power redundancy.
Ideal for both beginners and advanced drone developers.
Comparison Table: Pixhawk 2.4.8 vs Pixhawk 4
Specification
Pixhawk 2.4.8
Pixhawk 4
Processor
STM32F427 Cortex-M4 @ ~168 MHz
STM32F76x/STM32F7 Cortex-M7 @ ~216 MHz or higher
RAM / Flash
~128 KB RAM, 2 MB Flash
~512 KB RAM, 2 MB Flash (improved memory)
IMU / Sensors
Single IMU package; standard sensors (gyro/accel/mag/baro)
Dual IMUs or higher grade sensors with higher temperature stability
I/O Ports / Interfaces
14 PWM/servo outputs, multiple UARTs, I2C, SPI, CAN
More outputs/ports, additional I/O, improved connector layout, better expandability
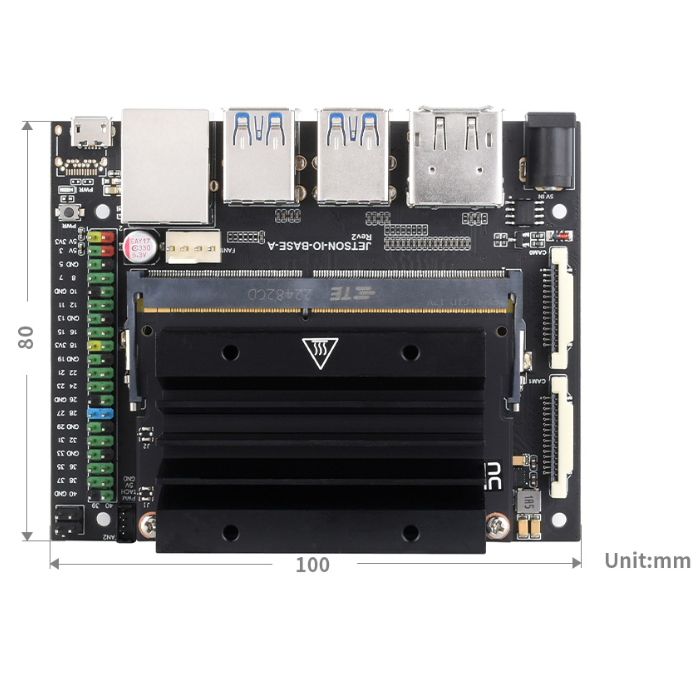
Size & Weight
Larger board (~82 × 50 mm) and heavier
Smaller form factor and lighter weight
Features
Proven, widely-supported flight controller with rich community support
Modern architecture, higher performance, better future-proofing
Best For
Hobby drones, standard multirotors/rovers where cost is key
Advanced UAVs, heavy payloads, applications needing higher precision & performance
₹8999.84
Out of Stock
MRP. ₹19579.00
Incl. GST (No Hidden Charges)