(0)
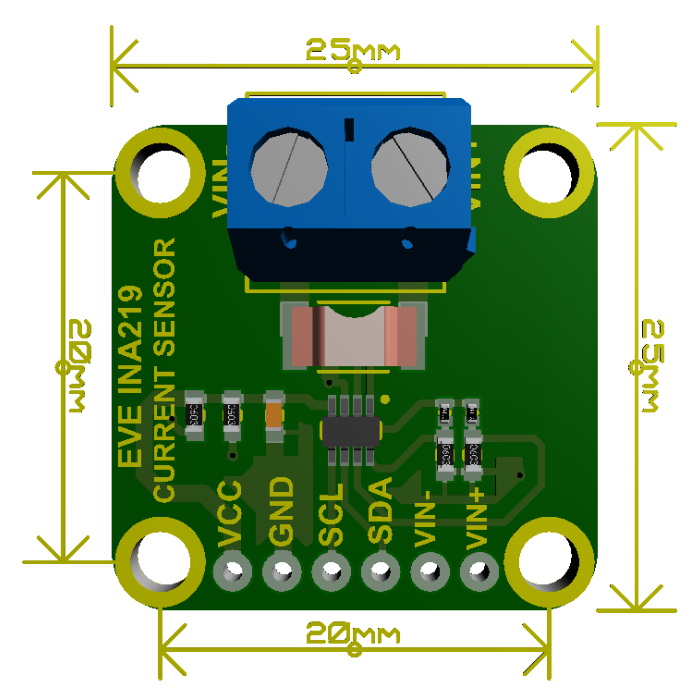
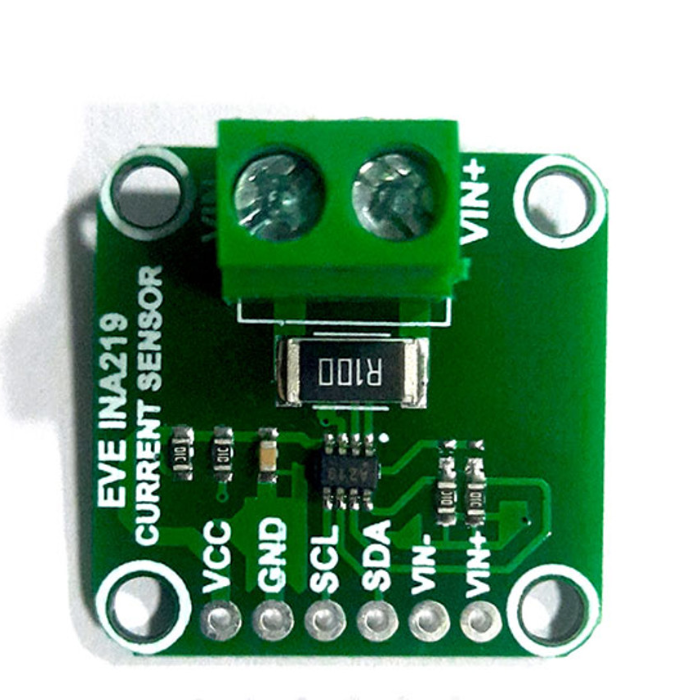
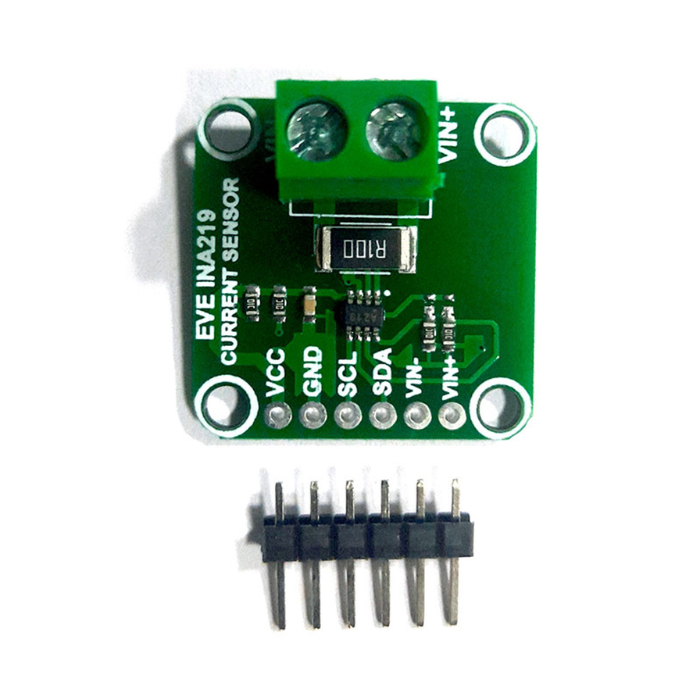
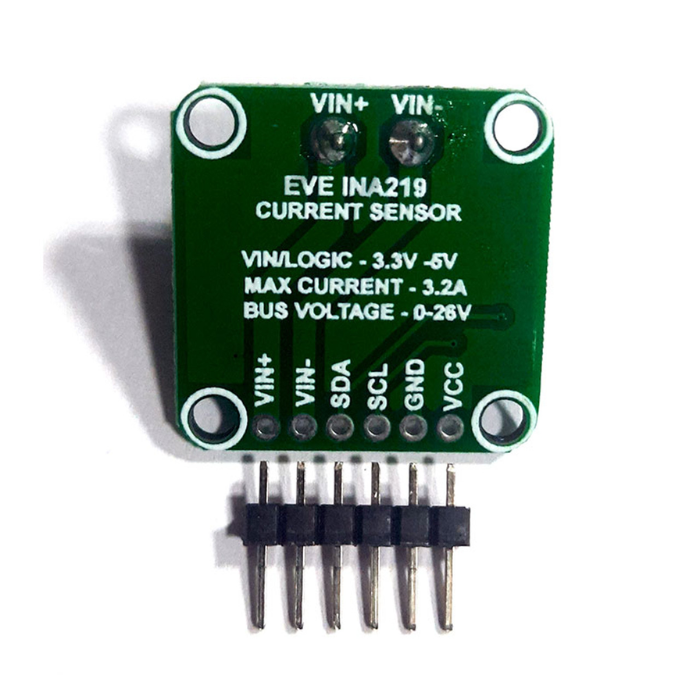
INA219 I2C Voltage, Current, Power Monitor Sensor Breakout -7Semi
The INA219 I2C Voltage, Current, and Power Monitor Sensor Breakout by 7Semi delivers precision power monitoring for advanced electronic applications. This INA219 current sensor is ideal for projects that demand accurate and efficient energy measurements.
Designed for high-side measurement, the INA219 supports bus voltages from 0 to 26V and features seamless I2C or SMBus communication, making it a versatile addition to embedded systems and battery-operated devices.
With an onboard precision shunt resistor, it ensures low-loss current sensing and offers 16 programmable I2C addresses, allowing for flexible integration in multi-device environments.
The module supports programmable gain, conversion times, and filtering, delivering highly accurate and reliable data across various use cases, from robotics and power diagnostics to energy management systems.
Its internal calibration system and multiplying registers simplify real-time current (in amperes) and power (in watts) calculations, all while consuming just 1mA in standby mode.
Features:
Wide Voltage Sensing Range:
Monitors bus voltages from 0 to 26 volts for both low and high-voltage applications.
Integrated Power Monitoring:
Real-time reporting on voltage loss, current draw, and power consumption.
I2C/SMBus Interface:
Provides seamless interaction with microcontrollers via I2C or SMBus communication.
Accurate measurements:
Voltage (±0.4%), current (±1%), and power allow for exact system diagnostics.
16 Programmable Addresses:
Allows monitoring of numerous modules on the same bus.
Programmable calibration:
Registers compensate for component tolerances to assure accuracy.
Low Quiescent Current:
Operates efficiently with only 1mA of standby current, making it ideal for low-power applications.
Alert Pin Functionality:
Sets system interrupts depending on preset thresholds.
Built-in Gain Amplifier:
Eight programmable gain settings provide sensitivity over a wide range of currents.
Filtering Options:
Adjustable filtering increases stability in noisy conditions.
₹235,91
MRP. ₹404,60
Incl. GST (No Hidden Charges)