(0)
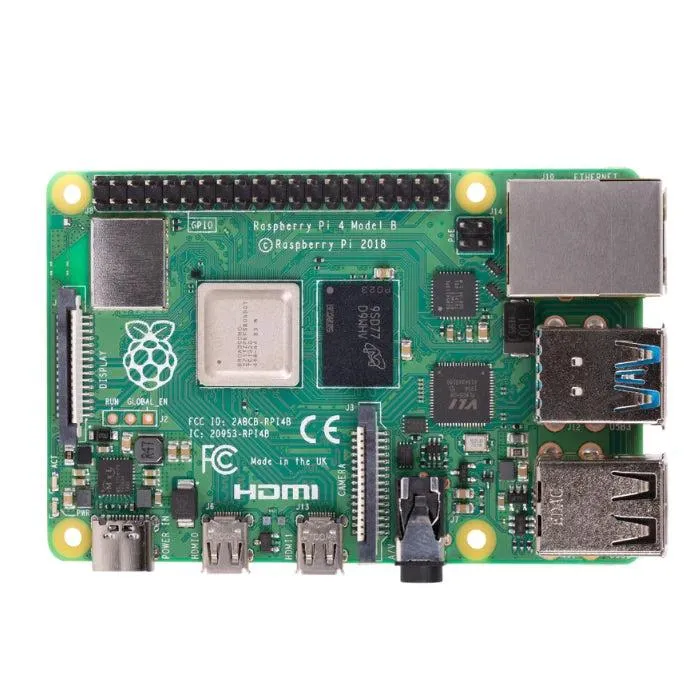
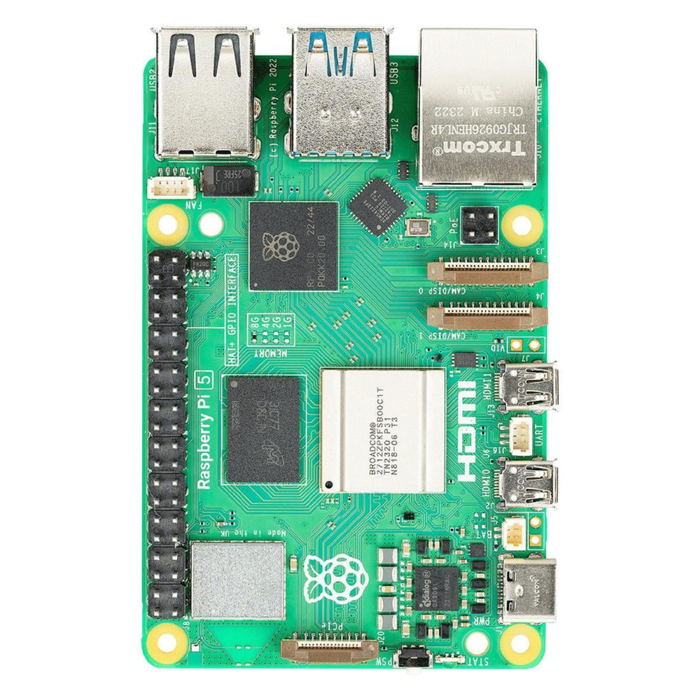
Raspberry Pi 4 Model B 8GB RAM
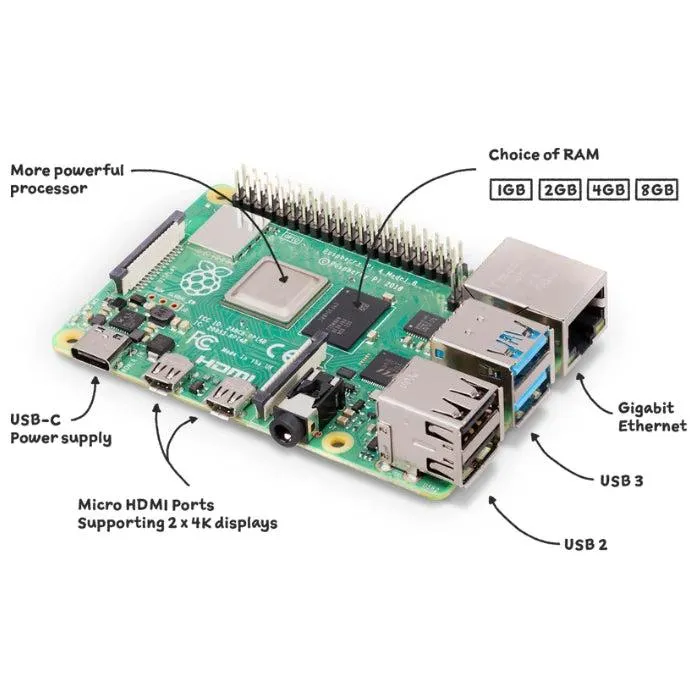
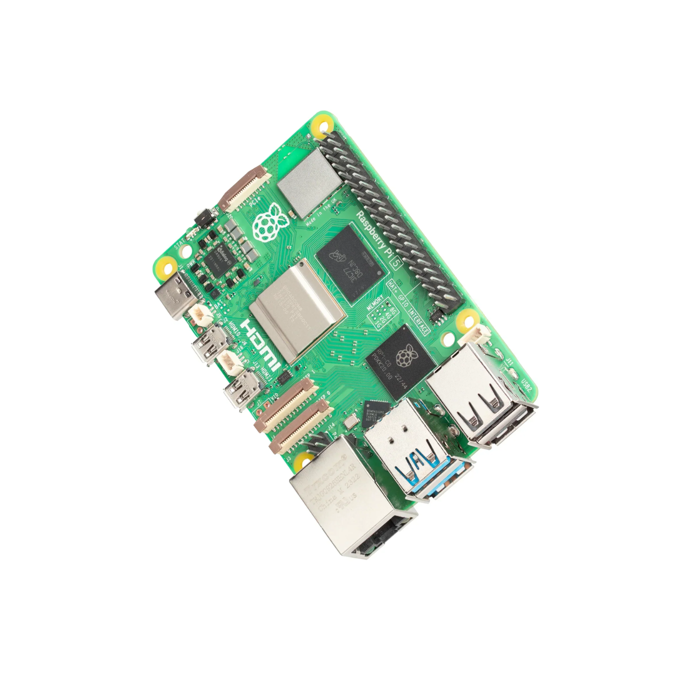
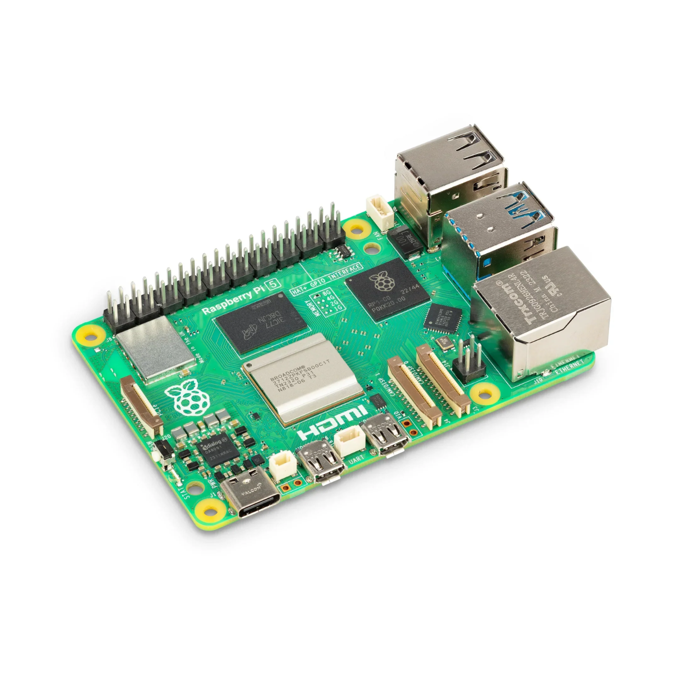
The Raspberry Pi 4 Model B (8GB) sets a new benchmark in compact computing, offering exceptional performance for academic, professional, and hobbyist applications. With 8GB of LPDDR4 RAM and a Broadcom BCM2711 Quad-Core Cortex-A72 (ARM v8-A, 64-bit) processor running at 1.5GHz, it delivers the processing power needed for advanced computing tasks such as artificial intelligence, data analysis, and software development.
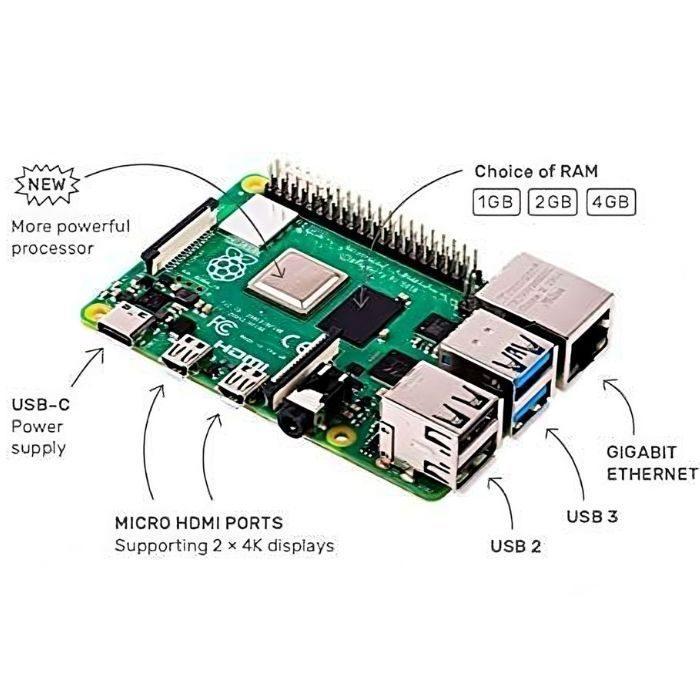
Supporting dual 4K displays via micro-HDMI ports, the Raspberry Pi 4B 8GB enables high-resolution visuals and smooth 4K video playback at 60 frames per second using H.265 decoding. It also features dual-band Wi-Fi (2.4GHz and 5GHz), Gigabit Ethernet, and Bluetooth 5.0, ensuring fast and stable connectivity for seamless browsing, streaming, and remote collaboration.
With two USB 3.0 and two USB 2.0 ports, along with a 40-pin GPIO header, the Raspberry Pi 4B allows easy integration of sensors, motors, and external devices—making it ideal for robotics, IoT, and electronic prototyping. Compatible with Raspberry Pi OS, Ubuntu, and lightweight Windows versions, this board is versatile, reliable, and easy to power using a standard 5V/3A USB-C adapter, making it an outstanding tool for learning, experimentation, and innovation.
Useful Link:
https://www.raspberrypi.com/documentation/computers/getting-
started.html
Key Features:
RPI 4 features a Broadcom 2711 processor for efficient multitasking.
8GB RAM enables running intensive data servers and virtual machines smoothly.
The latest Broadcom 2711 Quad-Core CPU at 1.5GHz for 20% faster performance.
Dual-display 4K support with hardware decode for smooth playback.
Dual-band 802.11ac Wi-Fi and Bluetooth 5.0 for faster, extended-range connectivity.
USB 3.0 technology for 10x faster wired networking.
Maintains 40-pin header with new PoE pins, caution with HATs.
Comes with NOOBS (New Out Of Box Software) for easy operating system installation.
Pin Diagram:
Important Information about Raspberry Pi 4
It can be used as a budget desktop PC with smooth multitasking.
Runs Chromium browser for fast web browsing.
Supports media centres like OSMC and LibreELEC for streaming and 4K playback.
Plays classic console games via RetroPie emulators.
Supports multiple OS options, including Raspbian, Ubuntu, and Snappy Core.
Acts as a Windows 10 thin client for remote desktop use.
Built-in WiFi and Bluetooth for seamless connectivity.
Dual-display support enhances multitasking and productivity.
Uses of Raspberry Pi 4:
Learn programming languages like Python, Java, or Scratch.
Learn to connect with sensors, LEDs, motors, and more.
Create home automation systems, control lights, and security.
Build gadgets, robots, or IoT devices.
Improve STEM education in schools and universities.
Prototyping of product ideas or concepts before full-scale development.
Comparison
Raspberry Pi 4B Vs Raspberry Pi 3B+ Vs Raspberry Pi 3B
Feature
Raspberry Pi 4 Model B
Raspberry Pi 3 Model B+
Raspberry Pi 3 Model B
Price (INR)₹
₹ 3599
VIEW
₹ 3649
VIEW
₹ 3999
VIEW
Processor
Broadcom 2711, Quad-core Cortex-A72 64-bit SoC @ 1.5GHz
Broadcom BCM2837B0, Quad-core Cortex-A53 64-bit SoC @ 1.4GHz
Broadcom BCM2837A1 (B0), Quad-core Cortex-A53 64-bit SoC @ 1.2GHz
Memory
1GB, 2GB, or 4GB LPDDR4 SDRAM
1GB LPDDR2 SDRAM
1GB LPDDR2 SDRAM
Connectivity
2.4GHz / 5.0GHz IEEE 802.11.b/g/n/ac wireless LAN, Bluetooth 5.0, BLE, 2 x USB 2.0 / 2 x USB 3.0 ports delivering true Gigabit Ethernet
2.4GHz / 5.0GHz IEEE 802.11.b/g/n/ac wireless LAN, Bluetooth 4.2, BLE, 4 x USB 2.0 ports, Gigabit Ethernet over USB2.0 (max. 300Mbps)
2.4GHz IEEE 802.11.b/g/n/ac wireless LAN, Bluetooth 4.1, BLE, 4 x USB 2.0 ports
Access
Extended 40-pin GPIO header
Extended 40-pin GPIO header
Extended 40-pin GPIO header
Video & Sound
2 x micro HDMI, 4K video, 1 x MIPI DSI display port, 1 x MIPI CSI camera port, 4-pole stereo output and composite video port
1 x full-size HDMI, 1 x MIPI DSI display port, 1 x MIPI CSI camera port, 4-pole stereo output and composite video port
1 x full-size HDMI, 1 x MIPI DSI display port, 1 x MIPI CSI camera port, 4-pole stereo output and composite video port
Multimedia
H.265 decode (4Kp60), H.264 decode (1080p60), H.264 encode (1080p30), OpenGL ES 1.1, 2.0, 3.0 graphics
H.264, MPEG-4 decode (1080p30), H.264 encode (1080p30), OpenGL ES 1.1, 2.0 graphics
H.264, MPEG-4 decode (1080p30), H.264 encode (1080p30), OpenGL ES 1.1, 2.0 graphics
SD Card Support
Micro SD format for loading OS & data storage
Micro SD format for loading OS & data storage
Micro SD format for loading OS & data storage
Input Power
5V/3A DC via USB Type-C connector, 5V DC via GPIO, POE enabled
5V/2.5A DC via micro USB connector, 5V DC via GPIO, POE enabled
5V/2.5A DC via micro USB connector, 5V DC via GPIO
Performance Tests: Raspberry Pi 4 Model B (8GB) vs Earlier Versions
Powered by a quad-core ARM Cortex-A72 processor, offering a major performance jump over the older Cortex-A53 used in previous Pi models.
Delivers faster application launches, smoother multitasking, and improved web browsing performance.
In memory-intensive tasks, the 8GB variant shows higher read/write speeds and better overall responsiveness.
Handles large datasets efficiently, enabling faster data transfers and better performance for heavy workloads.
Upgraded hardware including USB 3.0 ports and Gigabit Ethernet enhances transfer speeds and network reliability.
Ideal for power users running virtual machines, data-heavy programs, or multi-tab browsing sessions.
₹20840.51
Backorder Available
₹32758.60
Incl. GST (No Hidden Charges)